GANGAKUARTI MARZIALI ,KARATE , KICK BOXING,SUB, MOTO, INFORMATICA ,ROBOTICA , NANO TECNOLOGIE,GENETICA,ET |
GIRO PROVA GOMME

KAWASAKY

TAG
OROLOGIO
MENU
I MIEI BLOG AMICI
ROBOTICA

TELEROBOTICA
ROBOTICA IN CAMPO MEDICO

SUB PROTEZIONE ESERCITAZIONE

SUB2

SUB



|
Le nanoscienze costituiscono il punto di incontro di discipline diverse che vanno dalla fisica quantistica, alla chimica supramolecolare, dalla scienza dei materiali, alla biologia molecolare e rappresentano una realtŕ ormai affermata nel mondo della ricerca. Le nanotecnologie, che sono invece ancora nella fase iniziale del loro sviluppo, puntano a sfruttare e ad applicare i metodi e le conoscenze derivanti dalle nanoscienze. Esse fanno riferimento ad un insieme di tecnologie, tecniche e processi che richiedono un approccio multidisciplinare e consentono la creazione e utilizzazione di materiali, dispositivi e sistemi con dimensioni a livello nanometrico. La nanotecnologia č un ramo della scienza applicata e della tecnologia che si occupa del controllo della materia su scala dimensionale inferiore al micrometro normalmente tra 1 e 100 nanometri, e della progettazione e realizzazione di dispositivi in tale scala.Il termine indica genericamente la manipolazione della materia a livello atomico e molecolare dove il nanometro č la comune unitŕ di lunghezza ed č a volte usato per descrivere in generale altre tecnologie microscopoche
La Nanotecnologia costituisce un ambito d'investigazione altamente multidisciplinare, coinvolgendo molteplici indirizzi di ricerca che vanno dalla biologia molecolare alla chimica scienza dei materieli e ovviamente fisica, sia applicata che di base, fino dall'ingegneria meccanicaed elettronica. Puň essere vista sia come un'estensione delle scienze esistenti sulla scala nanometrica, che come un loro riarrangiamento, usando un termine moderno. Due sono gli approcci principali perseguiti attualmente in questo ambito: uno č detto approccio "bottom-up" poiché i materiali e i dispositivi sono realizzati partendo da componenti molecolari che si auto-assemblano tramite legami chimici, sfruttando principi di riconoscimento molecolare (chimica supramolecolare); l'altro č detto approccio "top-down", dal momento che i dispositivi sono fabbricati da materiali macroscopici attraverso un attento controllo dei processi di miniaturizzazione con precisione a livello atomicoprimo riferimento alla nanotecnologia fu fatto (non utilizzando ancora questo nome) nel discorso tenuto da Richard Feynman nel 1959 intitolato There's plenty of room at the totton.
Feynman suggerě un modo per sviluppare l'abilitŕ di manipolare atomi e molecole direttamente, sviluppando una serie di macchine utensili in scala uno a dieci analoghe a quelle che si trovano in ogni negozio di meccanica. Questi piccoli strumenti, quindi, sarebbero stati utilizzati per sviluppare e controllare la generazione successiva di utensili in scala uno a cento, e cosě via. Mano a mano che le dimensione diventava minore, sarebbe stato necessario ridisegnare alcuni utensili a causa del fatto che il rapporto tra le varie forze sarebbe cambiato. La gravita'' sarebbe diventata meno importante, la tensione superficiale sarebbe diventata piů importante, cosě come la forza di van der Waal etc. Feynman menzionň tutti questi problemi di scala durante il suo discorso; la fattibilitŕ della sua proposta non č mai stata efficacemente confutata. Il termine nanotecnologia fu utilizzato per primo da Kim Erik Drexler nel suo libro del 1986 Engines of Creation:The coming Era of Nanotechnology. Nel quarto capitolo, Drexler introduce l'autoreplicazione (vedi anche la macchina di von Newmann, o macchina autoreplicante), un'altra potente promessa della nanotecnologia. Le cellule costruiscono copie di se stesse per riprodursi ed i robot molecolari progettati dall'uomo potrebbero fare la stessa cosa. Questo dovrebbe significare che, dopo le enormi spese di ricerca sulla progettazione e costruzione del primo robot molecolare capace di auto-replicazione, il successivo trilione di robot costerebbe l'equivalente di una massa equivalente di verdura. Questi stessi robot con capacitŕ generiche, chiamati assemblatori, potrebbero quindi costruire oggetti piů specializzati che sarebbero direttamente utili agli esseri umani, potendo assemblare case, utensili da cucina, automobili, arredi, strumenti medici, navi spaziali, etc. Come gli assemblatori stessi, questi stessi prodotti sarebbero estremamente a buon mercato, comparandoli a quelli fabbricati oggi. In particolar modo, i materiali necessari per questi processi di produzione sarebbero quelli grezzi: atomi, energia, il progetto softwaer, e il tempo. Ralph Merkle ha comparato la chimica contemporanea al tentativo di costruire interessanti costruzioni con i mattoncini Lego mentre si indossano guanti da boxe: infatti, dato che fino a poco tempo fa non avevamo strumenti che ci permettessero di posizionare un particolare atomo in un determinato luogo (cosě che si leghi in modo prevedibile con un altro particolare atomo), dovevamo lavorare con numeri di atomi statisticamente grandi. Come risultato, quando producevamo una particolare reazione chimica, frequentemente ottenevamo parecchie specie di prodotti atomici diversi. La reazione era perciň spesso seguita da un processo di filtraggio fisico per estrarre le specie a cui eravamo realmente interessati, separandole dalle altre specie scartate a priori. La nanotecnologia puň, quindi, offrire processi produttivi molto piů puliti e selettivi rispetto a quelli che erano disponibili ieri con questa tecnologia grezza. La tecnica che ha reso possibile un tale sviluppo concettuale e pratico č la scansione ad effetto di sonda, originariamente sviluppata come forma di microscopia avanzata, sotto il nome di microsopio ad effetto tunnel, e successivamente affinata fino a produrre una gran varietŕ di strumenti che oggigiorno sono in grado di sondare la materia con risoluzioni superiori al miliardesimo di metro e con la possibilitŕ di interagire con un singolo atomo, spostarlo a piacere su di una superficie, fissarlo ad essa, ecc. |



|
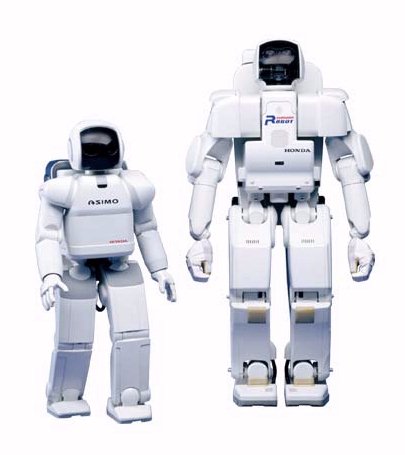
Le ricerche svolte riguardano realizzazione di un sistema per il telecontrollo di un robot composto da:
Alla fine degli anni '60 i robot erano poche decine. Oggi i robot per la chirurgia sono circa 300. La chirurgia puň indicare le funzioni che potrebbero essere svolte da un robot; partendo dalle richieste specifiche, si puň scegliere o inventare il robot piů adatto, che si applica con le interfacce grafiche, i calcolatori di elaborazione, le banche dati di gestione. L'esperienza acquisita nel Progetto e nella costruzione di robot per sofisticate operazioni industriali puň essere trasferita nella medicina e nella chirurgia.
La presenza dell'essere umano, sia come chirurgo sia come paziente, rende il compito piů difficile e significativo. Oggi la robotica chirurgica appare come un'applicazione di frontiera; tra pochi anni, forse con morfologie nuove di robot per ben definite applicazioni, nulla impedisce di presumere che divenga attivitŕ quotidiana. Le parole "chirurgia" e "robotica" presentano un'analogia etimologica. Chirurgia č operativitŕ con le mani (radici: chein, mano, e ergon, lavoro, in greco). La etimologia di robot č legata alla parola slava con radice raboti, cioč lavoro. La robotica esiste come integrazione scientifica di meccanica, elettronica, informatica, sensoristica, controllistica. La chirurgia utilizza anche l'elaborazione delle immagini, la visione endoscopica e l'uso di strumenti ed apparecchi tecnologicamente diversi dai tradizionali. La chirurgia laparoscopica per prima ha coinvolto il chirurgo in un ambiente nuovo, con un'immagine del campo operatorio non solo reale ma anche virtuale. Il monitor riporta l'immagine vista dalla endocamera, inserita nel corpo del paziente. La chirurgia robotica ha mostrato alcune applicazioni nell'uso di robot passivi in neurochirurgia stereotassica. I calcolatori trasmettono informazioni sulle condizioni di punti del cervello e, attraverso l'elaborazione delle immagini fornite da TAC, posizionano l'estremitŕ di un robot. Va tenuta in conto primario la affidabilitŕ delle operazioni robotizzate, poiché la sicurezza rappresenta il vero vincolo per la robotica chirurgica, laddove essa č ragionevolmente applicabile. |





|
Una volta che la tecnologia avanzň al punto che la gente intravedeva delle creature meccaniche come qualcosa piů che dei giocattoli, la risposta letteraria al concetto di robot rifletté le paure che gli esseri umani avrebbero potuto essere rimpiazzati dalle loro stesse creazioni.
che viene spesso definito il primo romanzo di fantascienza, č divenuto un sinonimo di questa tematica. Quando il dramma di Čapek, R.U.R., introdusse il concetto di una catena di montaggio operata da robot che costruivano altri robot, il tema prese delle sfumature politiche e filosofiche, ulteriormente disseminate da film classici .
Nella introduzione al suo romanzo , Asimov ha detto di avere fatto in tale serie "Il primo uso della parola robotica nella storia del mondo, per quanto ne so."
Letteratura
|


|
Il termine robot deriva dal termine robota, che significa "lavoro pesante" o "lavoro forzato". L'introduzione di questo termine si deve allo scrittore ceco , il quale usň per la prima volta il termine nel nel suo dramma teatrale .
a degli appunti di Da Vinci, riscoperti negli , contengono disegni dettagliati per un cavaliere meccanico, che era apparentemente in grado di alzarsi in piedi, agitare le braccia e muovere testa e mascella. Il progetto era probabilmente basato sulle sue ricerche anatomiche registrate nell . Non si sa se tentň o meno di costruire il robot (vedi: ). |




INFO
KARATE GRANDE SENSEI

CERTIFICATO AUTENTICITA' NICK NAME
RITSUREY 2
RITSUREY 4

REY SALUTO
ULTIME VISITE AL BLOG
ULTIMI COMMENTI
CHI PUŇ SCRIVERE SUL BLOG
I messaggi e i commenti sono moderati dall'autore del blog, verranno verificati e pubblicati a sua discrezione.


REALTA' VIRTUALE

REALTA' VIRTUALE ANIMATA

RETE NEURALE

DURANTE LA NAVIGAZIONE COMPORTATI BENE...


POTREI SEGUIRTI....
Inviato da: ganganku
il 08/07/2008 alle 00:02
Inviato da: ganganku
il 07/07/2008 alle 23:59
Inviato da: ganganku
il 07/07/2008 alle 23:57
Inviato da: ganganku
il 07/07/2008 alle 23:55
Inviato da: ganganku
il 07/07/2008 alle 23:53