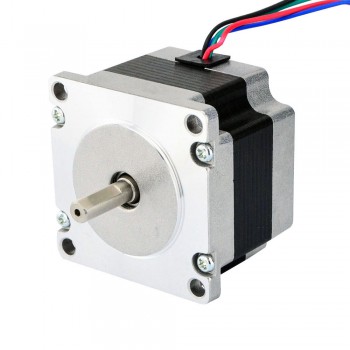
Ein Schrittmotor ist ein Motor, der elektrische Impulssignale in entsprechende Winkelverschiebungen oder lineare Verschiebungen umwandelt. Jedes Mal, wenn ein Impulssignal eingegeben wird, dreht sich der Rotor um einen Winkel oder bewegt sich einen Schritt vorwärts. Seine Ausgangswinkelverschiebung oder lineare Verschiebung ist proportional zur Anzahl der Eingangsimpulse und die Drehzahl ist proportional zur Impulsfrequenz. Daher werden Schrittmotoren auch Pulsmotoren genannt.
Schrittmotoren lassen sich anhand ihrer Bauform in verschiedene Typen einteilen, wie z. B. reaktive Schrittmotoren, Permanentmagnet-Schrittmotoren, Hybrid-Schrittmotoren und so weiter.
Die Betriebsleistung von Schrittmotoren hängt eng mit der Steuerungsmethode zusammen. Aus Sicht der Steuerungsmethode können Schrittmotorsteuerungssysteme in drei Kategorien unterteilt werden: Steuerungssysteme mit offenem Regelkreis, Steuerungssysteme mit geschlossenem Regelkreis und halbgeschlossene Steuerungssysteme. Halbgeschlossene Regelungssysteme werden in der Praxis im Allgemeinen als Systeme mit offenem Regelkreis oder mit geschlossenem Regelkreis klassifiziert.
Reaktionsformel: Auf dem Stator befinden sich Wicklungen und der Rotor besteht aus weichmagnetischen Materialien. Der Aufbau ist einfach, die Kosten sind niedrig, der Schrittwinkel ist klein (bis zu 1,2°), aber die dynamische Leistung ist schlecht, der Wirkungsgrad ist gering, die Wärme ist groß und die Zuverlässigkeit ist schwer zu garantieren.
Permanentmagnettyp: Der Rotor des Permanentmagnet-Schrittmotors besteht aus Permanentmagnetmaterial und die Anzahl der Pole des Rotors entspricht der Anzahl der Pole des Stators. Er zeichnet sich durch eine gute dynamische Leistung und ein großes Ausgangsdrehmoment aus, weist jedoch eine geringe Genauigkeit und einen großen Schrittwinkel (im Allgemeinen 7,5° oder 15°) auf.
Hybridtyp: Der Hybrid-Schrittmotor vereint die Vorteile des reaktiven Typs und des Permanentmagnettyps. Der Stator verfügt über mehrphasige Wicklungen, der Rotor verwendet Permanentmagnetmaterialien und zur Verbesserung gibt es sowohl am Rotor als auch am Stator mehrere kleine Zähne die Schrittgenauigkeit. Es zeichnet sich durch ein großes Ausgangsdrehmoment, eine gute dynamische Leistung und einen kleinen Schrittwinkel aus, weist jedoch eine komplexe Struktur und relativ hohe Kosten auf.
Je nach Wicklung am Stator gibt es Zweiphasen-, Dreiphasen- und Fünfphasenreihen.Der beliebteste ist der Zweiphasen-Hybrid-Schrittmotor, auf den mehr als 97 Prozent des Marktanteils entfallen, was auf die hohe Kosteneffizienz zurückzuführen ist, mit der ein unterteilter Treiber gute Ergebnisse erzielt. Der grundlegende Schrittwinkel dieses Motortyps beträgt 1,8°/Schritt, mit einem Halbschritt-Treiber wird der Schrittwinkel auf 0,9° reduziert, mit einem unterteilten Treiber kann der Schrittwinkel um bis zu 256 mal unterteilt werden (0,007°/Mikroschritt).
Verwandte Artikel: https://www.oyostepper.de/article-1168-Wie-w%C3%A4hle-ich-die-richtige-Stromversorgung-f%C3%BCr-den-Schrittmotortreiber-aus.html