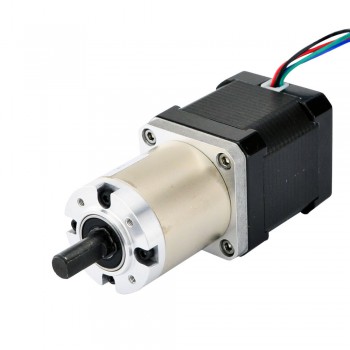
Die Hauptfunktion des AC-Getriebemotors besteht darin, die Motorgeschwindigkeit anzupassen und das Ausgangsdrehmoment zu erhöhen. Durch die Montage eines Untersetzungsgetriebes am Motor kann der AC-Getriebemotor die Drehzahl effektiv reduzieren und das Ausgangsdrehmoment erhöhen und eignet sich für Getriebegeräte, die eine niedrige Drehzahl und ein hohes Drehmoment erfordern.

Strukturelle Eigenschaften des AC-Getriebemotors
Der Aufbau des AC-Getriebemotors ist relativ einfach, ohne Lenkgetriebe und Bürsten, daher ist er einfach herzustellen und verfügt über eine solide Struktur, die die Realisierung von Hochgeschwindigkeits-, Hochspannungs-, Großstrom- und Großmotoren erleichtert. Kapazitätsmotoren. Diese Eigenschaften machen AC-Getriebemotoren in industriellen Anwendungen äußerst zuverlässig und langlebig.
Anwendungsgebiete von AC-Getriebemotoren
AC-Getriebemotoren werden häufig in verschiedenen Situationen eingesetzt, in denen eine präzise Steuerung und Anpassung der Geschwindigkeit erforderlich ist. Zum Beispiel:

Industrielle Produktion: In Ventilatoren, Wasserpumpen, Kompressoren und anderen Geräten sorgen AC-Getriebemotoren für eine effiziente Leistungsabgabe und einen stabilen Betrieb.
Transport: In Elektrofahrzeugen, Hochgeschwindigkeitszügen, U-Bahnen und anderen Transportfahrzeugen sorgen AC-Getriebemotoren für ein hohes Anlaufdrehmoment und einen stabilen Betrieb und verbessern so die Effizienz und Sicherheit des Transports.
Büroautomation, Smart Home, Produktionsautomatisierung, medizinische Geräte, Finanzmaschinen, Spielekonsolen und andere Bereiche: wie automatische Fensteröffnungsmaschinen, automatische Vorhänge, Bankautomaten, automatische Geldzählmaschinen usw. AC-Getriebemotoren können die Bewegung genau steuern der Ausrüstung. Verbessern Sie den Grad der Automatisierung.
Verwandte Artikel: https://www.oyosteppingde.com/2024/10/einfuhrung-in-die-grundprinzipien-und.html